Hi Buddies! In our last class, we built a digital clock without using interrupts — and yes, it worked well! But you might have noticed a small flicker when you pressed a button. Today, let’s solve that using interrupts. But before that, let’s understand what interrupts are. Blocking Code Method In earlier classes, especially when blinking LEDs, we used a delay inside the main loop. That delay blocks the system — during this time, the […]
Hi Buddies, Most of the time, we check the time on our phone or on store-bought wall clocks. But just imagine… what if we built our own digital clock? How cool would that be! Today, let’s build a fully functional digital clock from scratch, step-by-step using the Buddy51 board. Before we begin, this project uses some concepts from previous classes. If you haven’t watched those, please check them out first: Class 3 – How Single […]
Hi Buddies! Today on our BuddyKit, let’s explore one of the essential communication protocols – the I2C Protocol. Microcontrollers support many protocols like I2C, SPI, and Serial. Among these, I2C (Inter-Integrated Circuit) is widely used for communication between devices on the same board or across boards. I2C works with one master and multiple slave devices. Each slave device has a unique address, and communication starts when the master sends a data packet with the slave […]
🔧 What Does a Servo Need? A servo motor expects a control signal (PWM) every 20 milliseconds (50 times per second). This signal must stay HIGH for a specific time between: 0° angle → 500 microseconds HIGH pulse 90° angle → 1500 microseconds HIGH pulse 180° angle → 2500 microseconds HIGH pulse So, the width of the HIGH pulse determines the angle of rotation. After the HIGH pulse, the signal is kept LOW for the […]
Hi buddies! In this post, let’s explore the Timer and Counter feature in the Buddy51 board. Why use a Timer instead of NOP? In our previous examples, we used NOP-based software delays. However, these are not accurate. To achieve precise timing, we use hardware-based timers and counters. What is a Timer or Counter? A timer or counter is a register that increments with each clock pulse. If the pulse is from an external pin, it’s […]
Recent Posts
-

Class 11 – Digital Clock Using Interrupt
June 12, 2025 -
Class 10 – Digital Clock Project using 7 Segment
June 09, 2025 -
Class 9 – I2C Concept & RTC using DS1307
June 06, 2025



Most Commented
-
Class 6 – Simple Digital Door Lock
No Comments -
I2C – DS1307 – 24C02
No Comments -
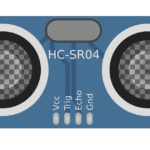
Ultrasonic Sensor Distance Calculation – BuddyKit
No Comments